Wouldn’t it be great to always have applications that can access the latest map data in real time without being restricted by local storage limitations or slow update cycles? Stop dreaming – such apps already exist. A cloud-native approach to map data distribution offers the flexibility and scalability you need to develop future-proof and agile solutions.
Cloud infrastructure helps applications to dynamically access resources, resulting in improved performance and faster deployment of new features. As a modular and self-contained standard, NDS.Live minimizes data consumption, enables downloading and caching of data and supports both embedded vehicle systems and cloud systems. So what could this look like and what advantages can a cloud-native approach bring to your day-to-day work? You’ll find some interesting answers below.
A modern navigation structure must be highly flexible, cloud-based and modular to optimally support key automotive trends such as ADAS (Advanced Driver Assistance Systems), electrification and automated driving. Traditional, static map solutions are no longer sufficient because they cannot be updated in real time and cannot efficiently process the increasing connectivity and growing volume of sensor data. A dynamic, cloud-native architecture that is continuously supplied with up-to-date data and that can intelligently link different data sources is the answer.

A crucial component of a modern navigation structure is the integration of highly precise, semantic maps. These maps offer much more than just road networks – they contain detailed information about road layouts, lane guidance, traffic signs, speed limits and topographical features. High-definition maps, also known as HD maps, are particularly crucial for ADAS and autonomous driving, as they enable precise localization, safe lane changes and predictive driving.
For seamless navigation in the age of electrification, maps must also provide intelligent functions for electric vehicles. A modern architecture should therefore incorporate real-time data on charging stations, their availability, plug types and prices, and optimize route planning according to battery capacity and charging times.
Dynamic range calculations that consider factors such as topography, weather or individual driving behavior are also elemental. Another key point is the cloud-based provision of map and traffic data. NDS.Live enables a modular structure in which vehicles only receive the map elements and traffic information they need from the cloud. This not only optimizes storage capacities but also maximizes the timeliness of the data – essential for autonomous vehicles that depend on information that is accurate to the millisecond.
Another vital aspect is networking with vehicle-to-everything (V2X) communication. Vehicles must be able to communicate with traffic lights, other road users and infrastructure to respond to hazards such as accidents or icy conditions in good time. The navigation structure must therefore offer open interfaces for connecting to such systems.
Cloud-based maps for navigation offer significantly greater scalability than conventional, locally stored map solutions. While traditional maps are based on pre-installed data sets that need to be updated regularly, cloud-native maps can be updated and scaled almost in real time. This enables more flexible adaptation to current traffic conditions, new infrastructure or short-term changes such as road closures.
Unlike traditional map formats, which often use monolithic data structures that are difficult to update, NDS.Live relies on a modular architecture. Map content is divided into small, dynamically retrievable data packets that are streamed as needed. This reduces the need for large local storage capacities in vehicles or on mobile devices, while at the same time ensuring continuous updates.
NDS.Live fundamentally redefines the navigation architecture by moving away from a static, device-based approach to a highly flexible, cloud-centered model. Map processing and delivery is decentralized in the cloud, so that computing power can be used efficiently and adapted to individual requirements. This architecture enables scalable delivery of map data worldwide, regardless of how many users access the services at the same time.
The NDS.Live data specification is divided into modules that are developed and versioned independently. Modules represent collections of related data, for example, types, definitions, and interfaces. Modules are made up of multiple packages and have their own metadata. They can usually be updated independently from other modules, both in definition and in data.
An NDS.Live implementation does not need to support all available modules. Only specific modules are mandatory: A minimal NDS.Live ecosystem includes at least the Registry Module and one further service module. The Registry Module acts as the entry point to all NDS.Live data services. The additional service module is needed to serve data.
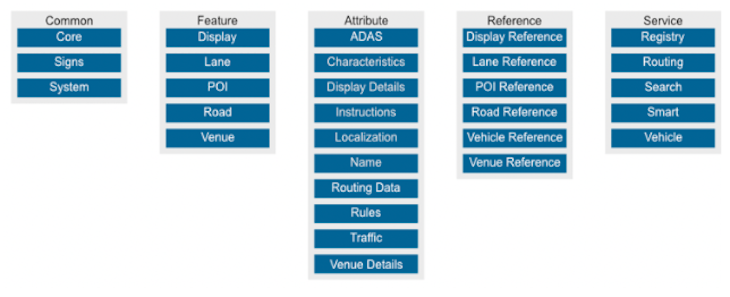
Modules with semantically similar content are grouped into the following categories: Common Modules, Feature Modules, Attribute Modules, Reference Modules, Service Modules. Module categories allow to define common rules for a set of modules. Common rules focus on dependencies between modules and on how the data of a module is served to the user.
Generally, the name of the module already implies what type of content to find there. For example, the Traffic Module contains all traffic-related attributes, the Routing Data Module contains data that is necessary to calculate routes, the Name Module contains names for display and geocoding use cases, and the Localization Module contains special geometries and relations to help with vehicle localization.
Not every use case has a direct representation using one module. For many use cases, data from multiple modules must be combined. For example, the Characteristics Module contains road type information as well as other physical properties of map features. The Rules Module contains different kinds of driving rules that are applicable to a road or lane. This includes signage and driving prohibitions.
In a hybrid navigation scenario, the application can switch seamlessly between a cloud service and a local service in the vehicle. The local services can include map provisioning services that are based on preinstalled map data or on locally cached data. Local services can serve as fallback solution in case of insufficient connectivity to cloud services. Because NDS.Live services and service interfaces do not have to reside in the cloud, they can also be used as local services in such a scenario.
Hosting the same services in the cloud as well as locally has the benefit that the reading application only needs to be implemented against one interface. NDS.Live service interfaces can be implemented using any transport protocol or shared memory solution.
A cloud-native approach to map data distribution offers several advantages.
Overall, Cloud-based maps are superior to conventional map solutions in the navigation environment due to their high scalability, flexibility and real-time updates. NDS.Live plays a central role in this by providing a modular, cloud-native architecture that enables efficient and adaptable delivery of map data. This results in a better user experience, lower operating costs and opens up new possibilities for the further development of intelligent mobility solutions.
To learn more about NDS.Live, please visit the NDS.Live Developer Portal.
Back to news →