The proof of the pudding is in the eating, and testing is the be-all and end-all of increasingly safer mobility. When it comes to topics such as automated driving (AD), well-orchestrated and internationally standardized processes support global vehicle innovations. This is precisely the goal of the NDS Association and it is why we have a steadily growing number of members. So much for the theory. Sometimes, however, practical examples show much more impressively why standards are so important and how users make use of maps in NDS format in their projects. A good example is how BMW Group and dSPACE are using NDS and OpenDrive.
Marco Sippel, Validation Specialist at BMW, and Michael Kluge, Research and Development Group Lead at dSPACE, collaborate on closed-loop testing of automated driving functions with NDS formatted map data and using OpenDrive. The focus is on HiL tests. HiL is short for “Hardware in the Loop” and refers to testing processes in which an embedded system is connected to an adapted counterpart via its inputs and outputs. The HiL simulator generally serves as a replica of the system’s real environment.
The ASAM OpenDrive format provides a common base for describing road networks with extensible markup language (XML) syntax. Its main purpose is to provide a road network description that can be fed into simulations to develop and validate ADAS and AD features. Although an automated generation of 3D sceneries is possible, they sometimes lack environment details next to the actual area of driving. Therefore, manual 3D scene modification is necessary for some use cases.
The NDS to OpenDrive converter can transcode NDS formatted map data into the OpenDrive format and vice versa to support simulation activities of NDS members. Why is this converter is so handy? Quite simply, driving simulations can be helpful in numerous situations. For example, ECUs that work with NDS map data can be simulated with environmental and traffic simulation tools that require the same map data in OpenDrive format. With the converter, real-world situations can be made available for simulation during the development process by converting an NDS map to OpenDrive.

The center of the test setup is the ECU. For this ECU the developers need to provide appropriate input including the NDS maps that will be used to support ADAS and automated driving features. Another area that needs to be considered, are simulated driving environments using map data, ego-vehicles, and traffic.
Different SAE levels require different simulation
Under SAE levels 0 to 2 automated driving functions mainly support the driver. A vehicle with SAE Level 2 features can maintain its lane, and at the same time support the driver with braking and accelerating. The driver is still in full control and must monitor the vehicle’s actions. That’s why the system may not need to be as sophisticated as in higher-level automated driving scenarios. It also may require less information and data input. This looks different for higher-level functions (SAE Levels 3 to 5): Here, the vehicle drives, and the driver may be asked to take control of the vehicle when prompted. As the vehicle function does the driving it needs to run precise vehicle localization at all times. In dense urban areas localization with GNSS can be difficult due to high buildings and connection hurdles. That’s why in higher-level AD a sophisticated ground truth for localization is needed and this needs to be simulated to understand sensor positioning and reliability.
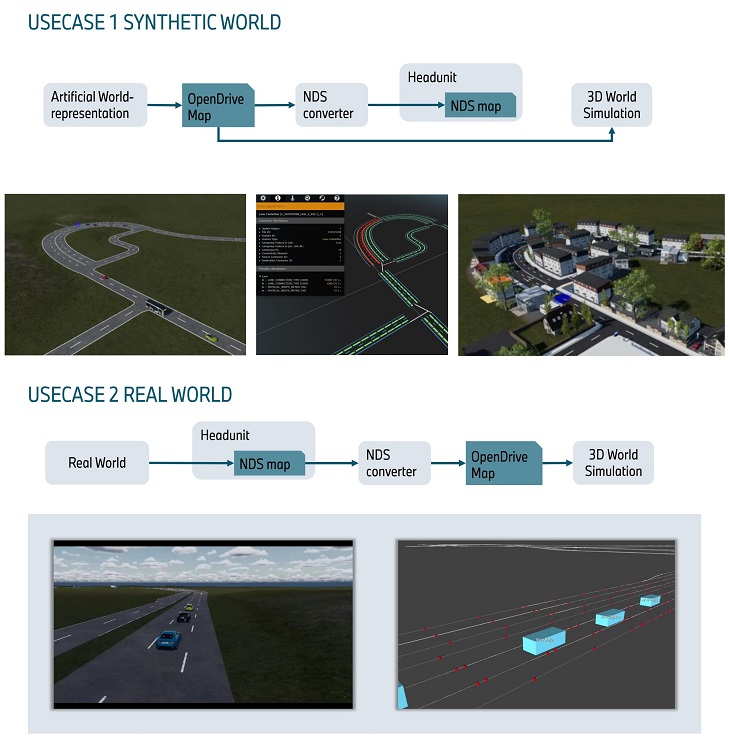
Artificial and real-world use cases
BMW and dSPACE are working on two particular use cases: For lower-level functions an artificial world is used to run simulation tests. In a second use case data real-world data and maps are required. In the HiL test setup, the NDS map running in the head unit needs to represent the world, the NDS to Open Drive Converter is used to transcode NDS data into OpenDrive for these simulation tests. With the dSPACE importer the map can be downloaded into the HiL. Ego vehicle, moving objects, and internal map representation is necessary for these test.
With the content of the environmental situation the team creates an OSI ground-truth which is abstracting map information to feed sensor models like radar sensor, lidar sensor, GNSS, and parts of the ECU functionality. A 3D visualization helps to see what’s happening inside the simulation. The output of the sensor models then goes to an ECU under test, controlling the ego vehicle and finishing the closed-loop simulation. In a first use case the developers want to use a synthetic world in the HiL testing scenario starting with an artificial world representation. In this lower-level setup less information is needed than in higher-level AD. A full control over the map is guaranteed and single aspects can be changed to test different variations easily.
Complex environments need real-world map data
One problem in artificial world testing, however, is that the type of representation is limited. That’s why BMW and dSPACE are also working with a second use case scenario: real-world. Here, a map from a map provider can be used in the head unit (e.g. an NDS formatted map). Again, the NDS to OpenDrive Converter helps to create an OpenDrive representation of the NDS map which then can be moved to a 3D world representation for sensor simulation. Bike lanes can also be represented in OpenDrive.
This real-world use case is needed because artificial scenarios cannot reflect the complexity of real-world traffic scenarios needed for automated driving. HD map data is key to automatically create highly complex scenarios for HiL and SiL (Software in the Loop) scenarios. More data and detailed environment information are crucial for testing localization and vehicle behavior in higher-level AD functions. Examples being traffic signs, specific buildings, road features and more. Additionally, an effective and reliable identification of relevant situations is key. Traffic signs for example can be automatically converted to help simulate road scenarios. The simulation can also replicate the GNNS position of the vehicle using NDS map data in the OpenDrive format. Real-world map data is essential for simulating more complex environments. Additional content can be manually added. Map changes must be considered.
BMW and dSPACE successfully deploy NDS and OpenDrive converters in the development of AD functions. The team of experts experienced that both directions of NDS and OpenDrive conversion are necessary to get best results. Higher-level AD requires more detailed OpenDrive maps to allow reliable localization.
Back to news →